对于很多汽车爱好者来说,汽车的魅力在于引擎的轰鸣、推背感的快感,或者是流畅的车身线条。但在这些看得见、听得到的硬件背后,隐藏着一个支撑起现代驾驶体验的“隐形灵魂”——那就是数学模型与控制算法。
今天,我们不谈枯燥的数学方程式,而是以拉杰什·拉贾马尼(Rajesh Rajamani)教授的经典著作《车辆动力学及控制》为线索,聊聊数学是如何让汽车变得更聪明、更安全、更节能的。
一、什么是“模型”?
在没有数学背景的人看来,数学公式只是一堆符号。但在工程师眼里,数学模型其实是汽车运动规律的“心理地图”。
想象一下,你教一个从没见过车的人如何倒车入库。如果你只告诉他“打方向盘,车就会拐弯”,这叫运动学模型。它只关心几何关系,不关心车有多重,也不关心轮胎是不是在打滑。这种模型简单直观,在低速行驶,比如自动泊车时非常精准,因为那时候轮胎受力很小,车基本按照轮子的指向走。
但当你以 120 公里的时速在高速公路上突然改变方向时,运动学模型就失效了。此时,汽车的质量、惯性、轮胎的抓地力都会跳出来“作妖”。这时我们需要动力学模型。它像是一本详细的物理账本,记录了路面对轮胎的每一个细微作用力。如果没有这套数学模型,你的电子稳定控制系统(ESC)根本不知道在紧急关头该给哪个轮子施加制动来救命。
二、侧向控制:为什么车能听你的话?
很多车友引以为傲的“操控性”,本质上是车身响应驾驶员指令的准确度。
1. 侧偏角:轮胎的“谎言”
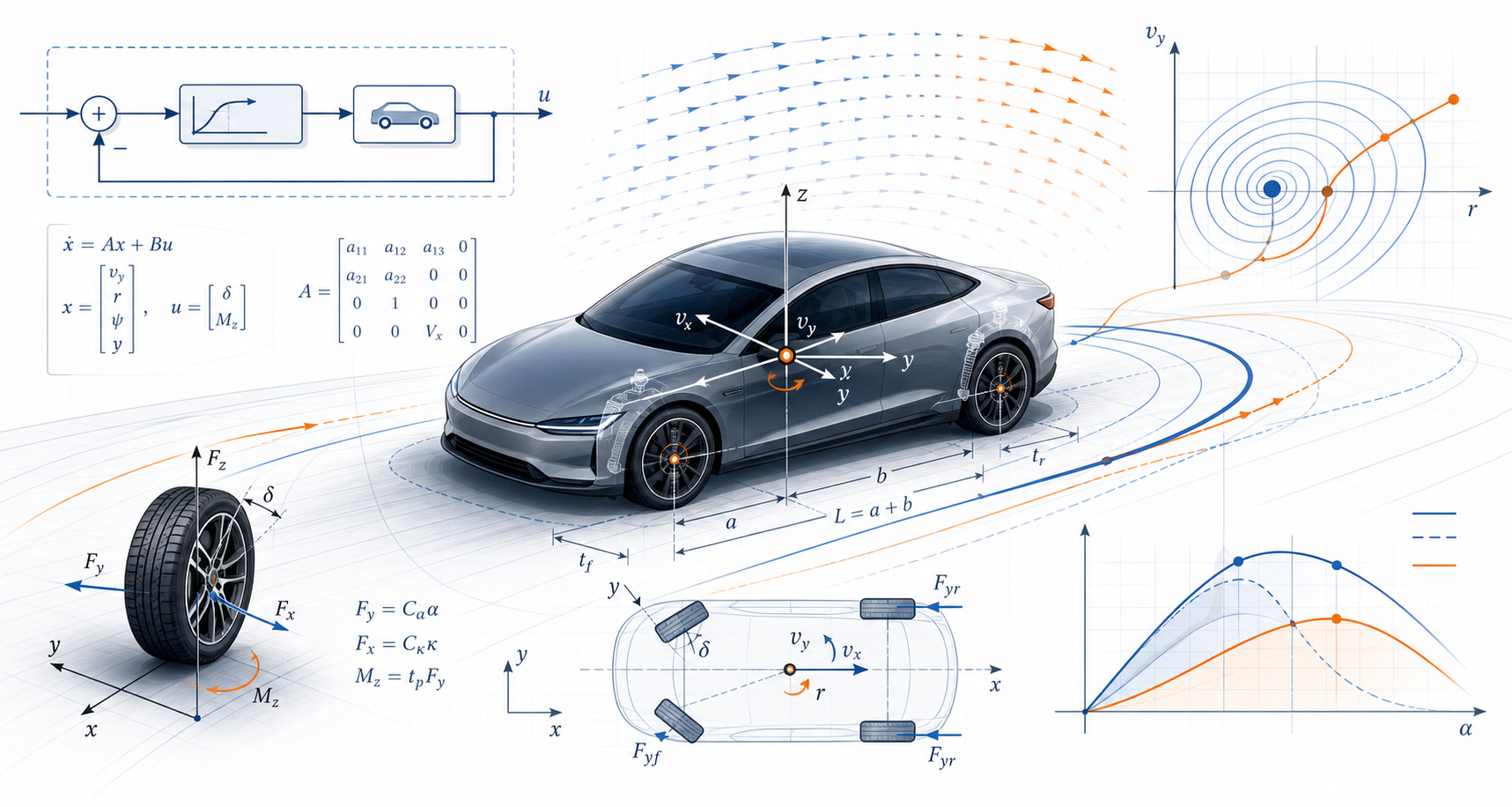
你以为方向盘转了 10 度,车轮就真的往那个方向走了 10 度吗?其实并没有。在高速转弯时,由于离心力的存在,轮胎会产生形变,其实际运动方向会偏离轮平面的指向,这个偏差就叫侧偏角。数学的作用,就是精确计算出这个角度。
如果侧偏角太大,车就会发生甩尾或侧滑。电子稳定控制系统(ESC)的逻辑就是:通过数学计算发现你的车头指向,也就是横摆角速度,和你的意图不符时,它会偷偷给内侧车轮来一脚刹车,把车“拽”回正轨。
2. 前瞻控制:像老司机一样“向前看”
现在的车道保持系统(LKS)能让车稳稳留在路中间。这背后的数学逻辑很有趣:它模仿了人类驾驶员的习惯,也就是前瞻(Preview)。数学模型会计算车辆前方一定距离,也就是前瞻距离的偏移量。数学证明,前瞻距离越长,系统就越像老司机,转向动作就越平顺,不容易反复“画龙”。
三、纵向控制:从巡航到自动跟车的“社交礼仪”
当你开启自适应巡航(ACC)时,汽车其实在进行复杂的数学运算,以满足某种“社交礼仪”——车队稳定性(String Stability)。
1. 拒绝蝴蝶效应
如果车队里第一辆车只是轻轻点了一下刹车,而数学算法设计得不好,这个微小的减速动作传到第十辆车时,可能会变成一次紧急制动。这就是缺乏“车队稳定性”。
数学家们发现,仅仅靠雷达测量距离是不够的。固定车距策略在自主控制下是不稳定的,必须引入固定时距策略(CTG),也就是车距要随着车速线性增加。数学计算告诉我们,只要你跟车的时距大于执行器延迟的两倍,这个车队就是稳定的,不会发生由于“蝴蝶效应”导致的连环追尾。
2. 刹车里的艺术
老司机都知道刹车不能抱死。但数学家发现,制动力最强的时候,并不是轮子滚得最顺畅的时候,而是轮子存在 10% 到 15% 的“滑移” 时。ABS 系统背后的数学逻辑,就是通过每秒几十次的加压和减压,把轮胎的滑动程度精准地锁死在这个“黄金区间”内,从而让你在最短距离内停下,同时还能打方向避障。
四、混合动力的“汇率管理”:等效燃油消耗最小策略(ECMS)
混动车到底什么时候用油、什么时候用电?这个能量管理远比你想象的复杂。
混动车的能量管理本质上是一场关于汇率的金融博弈。电池里的电和油箱里的油,就像两种不同的货币。
- 全局思维的局限:理想情况下,如果我们知道未来一整天的路况,哪段堵车、哪段下坡,我们可以用动态规划(DP)算出最省油的方案。但这就像预测股市,很难做到。
- 瞬时决策的智慧:ECMS 策略聪明地引入了一个等效因子。它把电能的消耗折算成燃油消耗。当电池电量充足时,“电价”很便宜,系统就多用电;当电量不足时,“电价”飞涨,系统就强迫发动机工作并给电池充电。
这个数学方法的优点是计算量极小,可以在车载电脑上实时运行,而且只要“汇率”,也就是等效因子设得准,它的省油效果能非常接近那些预知未来的神级算法。它体现了数学在处理“矛盾目标”,既要动力足,又要油耗低时的精妙平衡。
五、即使步入新能源时代,为什么基础研究依然不可忽视?
现在大家都在谈电动机、电池技术和自动驾驶芯片。似乎只要电机够猛、芯片算力够高,传统的动力学研究就不重要了。
这是一种非常危险的误区。
无论能源形式如何改变,物理定律是不会改变的。一台加速极快的电动车,如果它的侧倾补偿做得不好,或者由于电池过重导致质心升高而没有对应的防侧翻控制,它依然是一个危险的移动载体。
1. 物理底层的复杂性
轮胎与地面的摩擦力模型、悬架的振动频率、车身的侧倾动力学,这些基础研究是所有车辆控制系统的根基。芯片再快,如果传感器采集到的物理模型是错的,算法也只会得出错误的指令。
2. 安全性与平顺性的“不动点”
汽车悬架系统里存在一些数学上的“不动点”。这意味着在某些特定的频率下,无论你用多么强的主动悬架算法,都无法改善那里的震动。如果我们不进行深厚的基础数学积累,只是盲目堆砌硬件,永远无法突破这些物理瓶颈。
3. 新能源带来的新挑战
电机响应比引擎快得多,毫秒级对百毫秒级,这给控制系统带来了更大的发挥空间,但也意味着更窄的容错范围。如果缺乏对纵向、侧向动力学耦合的深厚积累,新能源车的动力优势反而可能变成安全隐患。
结语
汽车不仅仅是钢铁、橡胶和芯片的组合,它是跑在轮子上的数学。
从简单的巡航控制到复杂的混动能量管理,从保护性命的 ABS 到提升舒适性的天棚阻尼悬架,数学在背后默默地计算着每一份力、每一滴油、每一焦耳电。
对于汽车爱好者和从业者来说,仰望科技前沿的同时,也要脚踏实地钻研基础动力学和控制理论。汽车的魅力,始于引擎或电机,忠于物理,魂于数学。